人気の3Dカメラ Intel RealSense Dシリーズには、現在 D415、D435、D435i の3種類のモデルがラインアップされています。また、2019年3月には RealSense トラッキングカメラ T265がリリースされました。
今回はこれらのモデルの違いについてご紹介をしたいと思います。どの機種を選ぶべきか迷った際のご参考になれば幸いです。
※本記事は以下のWEBページを参照しています
Which Intel RealSense device is right for you
Choosing an Intel RealSense Depth Camera
まず、D415 と D435 の3Dカメラとしてのスペック上の主な違いについては以下のようなことが挙げられます。
※D435iについては慣性測定ユニット(IMU)が搭載されている以外の点についてはD435と全く同等となります
その1 : 視野角度 (FoV)
D415 : およそ 65°
D435 : およそ 85°
カメラ性能の観点からみると、D435は視野角度が広いため、画像の特定部分を見た場合に粒度の値が小さい(つまり解像度が低い)といえます。ステレオカメラは2つのセンサにより、わずかに異なる視点からの2つの画像を取得し、それらを比較し深度を特定しています。
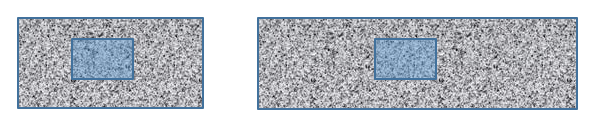
こちらの画像は各カメラのセンサが取得したイメージを拡大・誇張したものです。画像中の同じサイズの領域(四角で囲った部分)を見ると、D415のほうがピクセル密度が高いといえます。これは同じポイントで特定の領域についてD435よりもD415の方が、より正確だということになります。
これは障害物回避や人検知のような用途の場合には大きな差はありませんが、3Dスキャンなど精度が最優先の用途の場合には、D415の方がより優れた正確なスキャンが可能だと言えます (いうなれば、D415のほうがD435に比べて2倍以上の精度)。
その2 : シャッタータイプ
D415 : ローリングシャッター
D435 : グローバルシャッター
D415で採用されているローリングシャッターは、左右 もしくは 垂直に素早く対象をスキャンすることでシーン内の全てのピクセルを記録する方式となっています。これらは通常、数フレームの間に実施されますが、データはそれぞれ単一のフレームとして保存されます。

※ローリングシャッターのイメージ
一方、D435で採用されているグローバルシャッターはシーン全体を一つのフレームにスナップする方式で、各ピクセルが同時にキャプチャされるという点で、ローリングシャッターとは動作が異なります。
※グローバルシャッターのイメージ
その3 : モジュールに関する違い
D415 : Intel RealSense D415 module を使用
D435 : Intel RealSense D430 module を使用
D415については、Imagers, Emitters, RGBカメラ が一つのコンピュータボードもしくはstiffener (補強板)上にあるためキャリブレーションの実施がはるかに容易だという特長があります。
一方 D435においては、RGBカメラはモジュール上にはありません (RGBカメラはモジュールに別途接続されている状態)。デプスアルゴリズムはセンサの正確な配置に基づいているため、同じstiffener (補強板)に固定をしないと、深度とRGB間のキャリブレーションが困難になる可能性があります。
しかし、「RGBカメラを選択できる」という柔軟性も以前からユーザーに求められていた機能であるということもあり、ユーザーの利用方法によってはこれはメリットとなる部分でもあります。
その4 : Imager の違い
D415 : 2メガピクセルのImager を使用
D435 : 1メガピクセルのImager を使用
その5 : 最小Zの違い
カメラとキャプチャ対象との距離(最小Z)について、D435はD415と比べて任意の範囲でより多くの深度ノイズ (>2倍) があり、同じ解像度での最小操作距離が小さくなる(約0.5倍)ため、カメラにより近づことができます。たとえば、848×480の解像度において、D415の最小Zはおよそ29cm、一方D435の最小Zはおよそ17cmとなります。
■ 3Dカメラとしての比較まとめ
D415 と D435 (D435i)にはそれぞれに特徴があり、ユーザーさまの用途により使い分けていただくのがベストな選択方法だと言えます (なお価格はD415のほうがお求めやすくなっています)
それぞれこのような用途におすすめです
D435 :
視野角が広いことにより、ロボットやドローン等のナビゲートやトラッキング用途 に適している。
またグローバルシャッターは高速で動く対象を撮影する際に優れたパフォーマンスを発揮する。
D415 :
取得する画像データに正確さが求められる3Dスキャンなどの用途 に適している。
続いて、D435i と T265についてのご紹介です。

D435iは3Dカメラとしての仕様はD435と同等ですが、慣性測定ユニット(IMU)が追加搭載されています。
※ IMUは、深度データと同期して装置そのものの動きを測定することを可能にします。
T265にもこのIMUが搭載されていますが、さらに2つの魚眼カメラと独自のアルゴリズムを使用し、空間内の自身の位置を高い精度でトラッキングすることができます。なおT265は3Dカメラではないため、深度データを得ることはできません。ただし、T265をD400シリーズの3Dカメラと組み合わせることで、高精度のトラッキングと高品質の深度データとを組み合わせることが可能です。
なおD435iを使用して、SLAM向けに同様のアルゴリズムを実行することも可能です(この場合、D435iが接続されているホストデバイス上で実行され、T265アルゴリズムはカメラ自体で実行されます)。アプリケーションによっては、これで十分なトラッキング精度を得ることができます。ただしトラッキング精度が非常に重要な場合や、カメラが何度も素早い回転をするといった大きな動きをすることが想定される場合には、T265の方がより優れた能力を発揮します。
■ トラッキングカメラとしての比較まとめ
それぞれこのような特徴があります
D435i :
・トラッキング情報に加え、深度情報も同時に取得が可能
・生のIMUデータを接続されたホストデバイスへ直接配信する
T265 :
・より精度の高いトラッキング情報が必要とされる場合に適している
・デプスカメラではないため、深度情報は取得できない (※)
・魚眼レンズ搭載センサにより、163±5°という広範囲の視野をカバー
・IMUの読み取り値を自身のIntel Movidius Myriad 2.0 VPUにリダイレクトする
※ ただしDシリーズと組み合わせて使用することで、深度情報も取得可能 (組み合わせ例 : T265+D435 or T265+D415)
なおいずれのデバイスでも、同じオープンソースのIntel RealSense SDK 2.0を使用しているため、後に別のデバイスへ切り替えるような場合にも互換性のあるコードを簡単に作成することができます。これは今後リリースされるデバイスにおいても同様ですので、構築したデータは将来的に機能するといえます。
テガラの研究開発者向け海外製品調達サービス「ユニポス」でもRealSense Depth Camera D シリーズ およびRealSense Tracking Camera T265 をお買い求めいただます。
| ■ 商品の詳細、お問い合わせはこちら Intel RealSense Depth Camera (D415/D435/D435i) Intel RealSense Tracking Camera T265 |