

ロボットアームを搭載した自律移動型ロボットの導入は研究開発分野での一般化が進み、既に珍しいものではなくなっています。産業分野では既に実用化されている例もあり、将来的にはこれまで以上に様々な分野・用途での活躍が期待されています。
本記事では、「別々の製品同士を組み合わせて使うための器具」の製作・組立にチャレンジした過程をまとめてみました。研究開発において、異なるハードウェア同士の物理的な組み合わせや固定、オリジナル器具の試作をお考え中の方は是非ご覧ください。
目次
課題
今回の試作チャレンジの課題は以下の内容です。パーツの製作 >>> 取り付け >>> 検証 の全てを実施します。
| 弊社の所有する4足ロボット(Unitree A1) の背に別メーカーのロボットアーム (Ufactory uArm)を取り付けたい。 メーカー公式の取り付け器具などは用意されていないが、Unitree A1の動作に影響が出ないようにしっかりUfactory uArmが固定できるよう、オリジナル設計の取り付け器具を用意する。 |
対象としたアイテム
今回の試作チャレンジでは、研究開発用途で2つのアイテムを組み合わせて使用することを想定し、Unitree A1の上にUfactory uArmを搭載&物理的に固定するための試験的なアイテムとして、簡単な取り付け器具を作成することにしました。
■Solidworksで設計した取り付け器具の3Dモデル

| 注:本記事でご紹介する試作/検証は、あくまで簡易的な試作品の製作と機械的な統合です。システムインテグレーション、Ufactory uArmの動作、精緻な評価などは行っていません。 |
今回の試作チャレンジで用意した製品・パーツ類はこちらです。
|
[1] 4足ロボット(Unitree A1) :可搬重量 最大 5kg まで [2] ロボットアーム (Ufactory uArm Swift Pro):重量2.4kg (インターフェースケーブル含まず) [3] 試作した取付器具と固定用金具など:マウントプレート、取付用レール、ネジ、ナット (総重量220g) |
[3] で用意したパーツの写真と明細は以下のとおりです。これらと [1] [2] を組み合わせることにより、4足ロボット (Unitree A1) がロボットアーム (Ufactory uArm) を積載した状態で安定した姿勢変更・移動を行うことができる想定です。
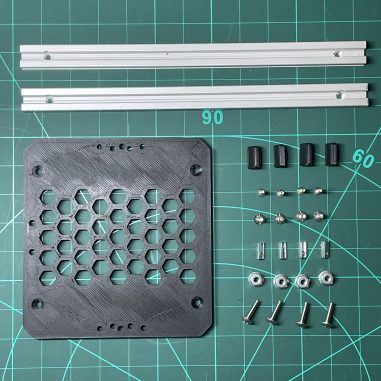
|
No. |
部品名 |
品番 |
メーカー |
数量 |
備考 |
|
1 |
マウントプレート |
|
|
1 |
3Dプリンター製作品 (材料PLA) |
|
2 |
アルミレール (16×8ストラットプロファイル5) |
L5-SPH1608N |
imao |
2 |
1m購入品を追加工:長さ240×2カット→2か所皿穴あけ |
|
3 |
アルミレール用後入れナット (Tナット5ST) |
5ST – L5-TST4 |
imao |
4 |
|
|
4 |
アルミフレーム用エンドキャップ |
|
|
4 |
3Dプリンター製作品 (材料PLA) |
|
5 |
M4x10 皿ねじ |
|
|
4 |
|
|
6 |
M4x15 トラスねじ |
|
|
4 |
|
|
7 |
M4 ゆるみ止めナット |
|
|
4 |
|
|
8 |
M3x12 十字穴付皿小ねじ |
|
|
4 |
|
作業内容
実際に行った工程は 「測定/準備 >>> 設計 >>> パーツ製作と準備 >>> 組立 >>> 操作トライ」 の流れです。
以下では、それぞれのフェーズでどのようなことを行ったのかをまとめました。
Phase 1.測定/準備
・メーカー (Unitree) からUnitree A1の取り付け用の特徴や寸法を入手
・Ufactory uArmのマニュアルを確認し、固定方法と器具の取り付けに必要な寸法を確認
Phase 2.設計
・CADで3Dモデリング/設計
主にはマウントプレートの3Dモデルの設計と制作を行いました。
マウントプレート自体の軽量化と 3Dプリント時間の短縮を目的として、プレートの中央部分をハニカム構造で設計しています。
また、組立時の傾きを防止するため、マウントプレートの底面にアルミフレームを取り付けるための溝を設けています。
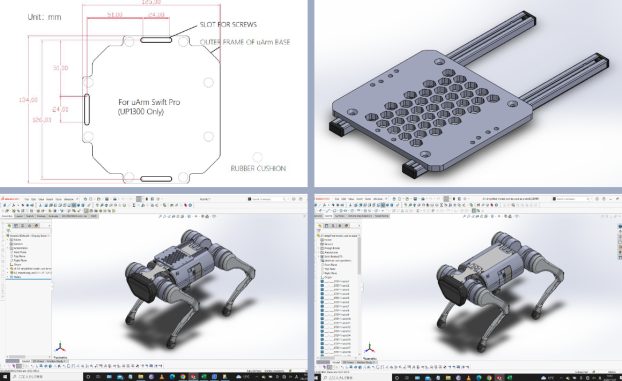
※設計当時はUfactory uArmのCADデータやアームの現物が手元になかったため、マニュアルに記載されている取り付け寸法をもとにネジ穴を設計。
Phase 3.パーツ製作と準備
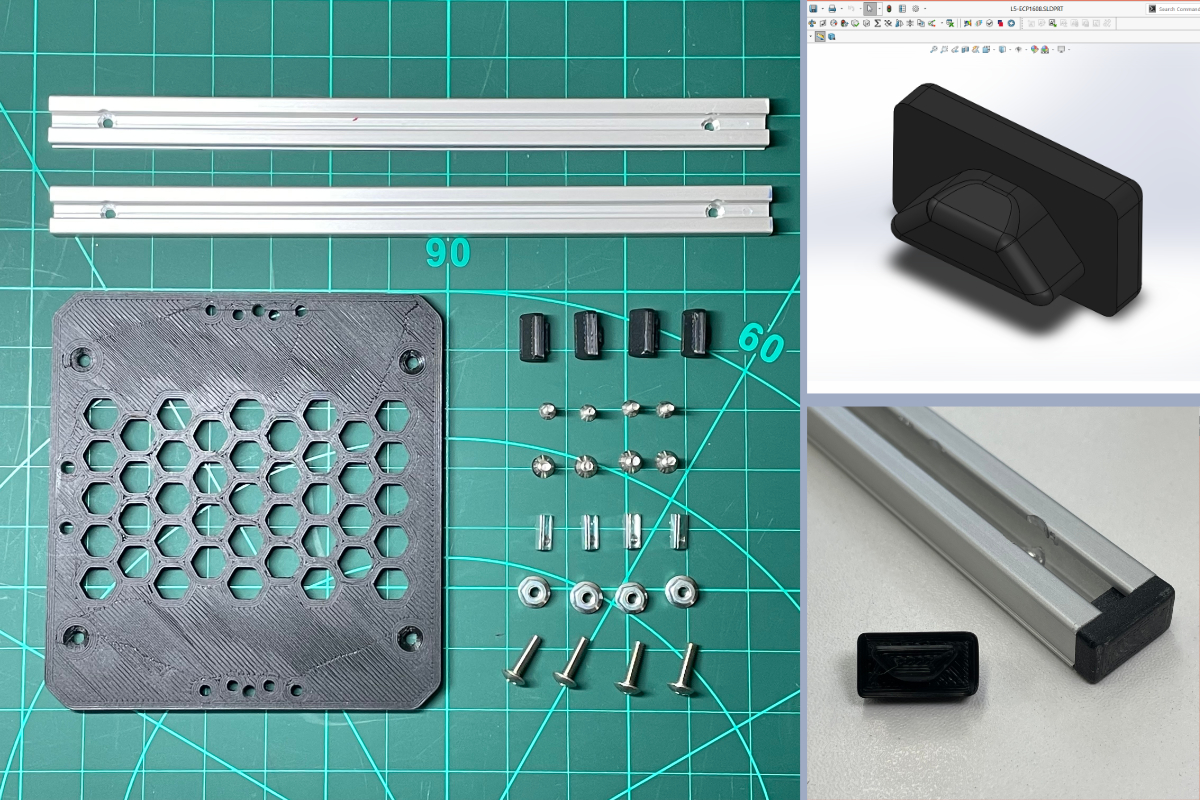
・3Dプリンターでの出力と各パーツの加工
3Dプリンターでマウントプレートとエンドキャップを出力しました。
また、手配したアルミフレームキャップのサイズが間違っていたため、メーカーサイトから正しいサイズのCADデータをダウンロードして、3Dプリンターで出力しています。
・ アルミレールの加工 (長さカット、穴あけ)
アルミレールの長さを調整しました。今回は試作的なチャレンジのため、この工程は手作業で実施しています。
(使用した工具:アルミ用のこぎり、電動ハンドドリル)
Phase 4.組立

・Unitree A1とUfactory uArmに用意した各パーツを取り付け
取り付け手順は以下のとおりです。組立動画と合わせてご覧ください。
- Unitree A1の上面にある、4つのゴム製プロテクター部品を取り外し。
- ゴム製プロテクター部品の取り付け穴を利用し、アルミレールをM3x12 十字穴付皿小ねじで取り付け。
- アルミレールに後入れナット4個をセットし、マウントプレートをM4x10皿ねじ4本で固定。
- Ufactory uArmをマウントプレートに乗せ、M4x15トラスねじとM4ゆるみ止めナットで固定。
| ※今回の試作品ではUfactory uArmをねじとナットで固定していますが、組立作業性の向上のため、マウントプレートにヒートセットインサートを使う方法もあります。 |
Phase 5.操作トライ
Ufactory uArmを積載した状態で、Unitree A1の基本的な歩行動作や姿勢の操作を実施
結果
今回の試作チャレンジの結果は、以下のとおりです。
|
Ufactory uArmの重量をしっかり支えられるような堅牢さをもった器具を作成することができた。 また、Unitree A1を動かした際にも、バランスを崩さず安定して操作することができた。 |
実際に組み立てた状態で動かした様子の動画を用意しました。立ち上がりや姿勢変更の違和感や不安定さを感じさせない動きをご確認いただけます。
まとめ
今回3Dプリンターで試作した取り付け器具は、Unitree A1にUfactory uArmを取り付けた状態での基本的な動作に耐え、全く問題なく利用することができました。なお、今回の取り付け器具はアルミレールを採用しているため、Unitree A1の背面にそってUfactory uArmの位置を変更することができます。
なお、特定の地形や前後の特殊な挙動を受けての姿勢制御において、Unitree A1の脚が交差してバランスを失い、クラッシュする可能性がある点には注意が必要です。Unitree A1は多少の衝撃には耐性がありますが、Ufactory uArm側の耐久性はあまり高くないため、転倒や接触には十分注意して操作する必要があります。
お客様のニーズに合わせた試作のお手伝いをいたします
今回作成した取り付け器具のように、弊社では3Dプリンターを利用したオリジナルパーツの設計・製作を承っています。
|
・オリジナルの器具/アタッチメントの試作 ・異なる商品同士を組み合わせるための器具 ・欠損・紛失したパーツの代替品 |
など、お力になれそうな場面がございましたら、気兼ねなくご相談ください。

|
3Dモデル制作や3Dプリンター出力を含むアイテムの設計・製作のご相談は、下記フォームよりお気軽にどうぞ。 出力例:3Dプリント (FDM)、レーザー彫刻、CNCルーター、CAD (2D/3D) データなど
|