

ユニポスの人気製品である Orbbec社の 3Dカメラ「Femto Bolt」が、”Azure Kinect DK の最適な 代替品である理由“をご紹介します。
本記事は、ドイツの人工知能研究センター (DFKI) のシニアリサーチャー Martin Günther 氏のレビューを元にしていおります
Orbbec Femto BoltとMicrosoft Azure Kinect DKを徹底比較しております。より具体的な情報は動画をご覧ください (カメラの性能、徹底比較!の章)。
※本記事は Orbbec社のドキュメンテーションの情報も参照しております
Femto Bolt Comparison with Azure Kinect DK
https://www.orbbec.com/documentation/comparison-with-azure-kinect-dk/
Orbbec Femto Bolt の紹介

Orbbec Femto Bolt は、Microsoft Azure Kinect DK (※2023年8月 製造中止) の技術が継承された3Dカメラです。
ToF (Time-of-Flight) 技術を採用し、優れた深度データ取得能力を持ちます。さらに、内蔵の6軸IMUが高精度な位置補正を行い、移動中の対象物を追尾しながら、正確なデータを提供します。
カメラの性能、徹底比較!
Femto Bolt と Azure Kinect DK の性能を Dr. Martin Günther (DFKI) による比較動画から抜粋して紹介します
同一センサーの使用について(動画のIntroduction: 0:00-1:16)
Femto Boltは、Azure Kinect DKで使用されているマイクロソフトの1メガピクセルToF (Time-of-Flight) 深度カメラを採用しています。
同一の動作モードと性能は以下の表を参照してください。
| モード | Resolution / FPS | 視野角(FOV) | Operationg Range | Exposure Time |
|---|---|---|---|---|
| NFOV unbinned | 640×576 @ 5/15/25/30 fps | 75°x65° | 0.5 – 3.86 m | 12.8 ms |
| NFOV 2×2 binned (SW) | 320×288 @ 5/15/25/30 fps | 75°x65° | 0.5 – 5.46 m | 12.8 ms |
| WFOV 2×2 binned | 512×512 @ 5/15/25/30 fps | 120°x120° | 0.25 – 2.88 m | 12.8 ms |
| WFOV unbinned | 1024×1024 @ 5/15 fps | 120°x120° | 0.25 – 2.21 m | 20.3 ms |
| Passive IR | 1024×1024 @ 5/15/25/30 fps | N/A | N/A | 1.6 ms |
Femto Bolt と Azure Kinect DK のサイズ違い (動画のIntroduction: 1:17)

Femto Bolt と Azure Kinect DKカメラを重ねて設置しています。動画ではこの状態で同じシーンにおける性能を比較しています。
まずはサイズ感。Femto Boltの奥行は、Azure Kinect DK の半分程度です。コンパクトでありながら、ほぼ同じポイントクラウドデータを取得できます。
| 主な特徴 |
Femto Bolt |
Azure Kinect DK |
|---|---|---|
| SDK Support | Orbbec SDK / Orbbec SDK K4A Wrapper | Azure Kinect Sensor SDK |
| Data Output | Point cloud, Depth Map, IR and RGB | Point cloud, Depth Map, IR and RGB |
| Dimensions (WxHxD) | 115.30x40.26x64.95 mm | 103x39x125.4 mm |
| Weight | 348 g | 440 g |
ROS対応と互換性について
Femto Boltは、ROS1/2対応ドライバー、SDK、Azure Kinect Sensor SDKと互換のあるAPI (Orbbec SDK K4A Wrapper) が提供されています。APIにより、Azure Kinect DK をベースに開発されたアプリケーションをスムーズに移行できます。
詳しい手順については、Orbbec社公式のGitHubをご参照ください
Orbbec SDK K4A Wrapper on GitHub
https://github.com/orbbec/OrbbecSDK-K4A-Wrapper
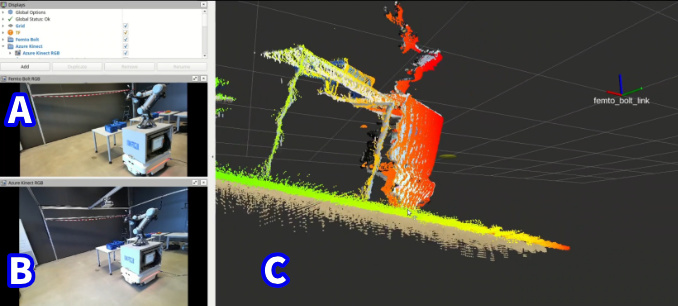
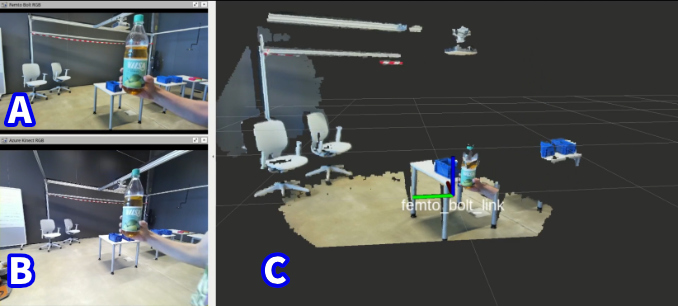
画像のクオリティについて (動画のImage Quality: 1:55)
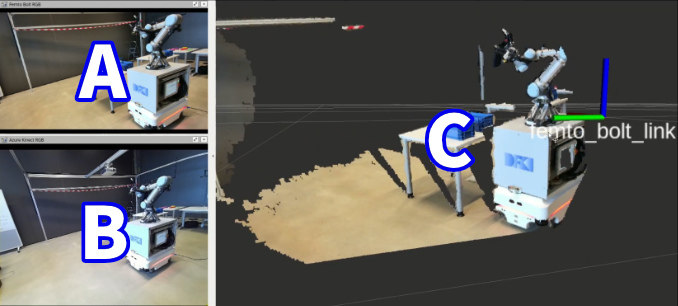
- 左上[A]: Femto Bolt のRGB画像
- 左下[B]: にAzure Kinect DK のRGB画像
- 右側[C]: Femto Boltのカラーポイントクラウド画像
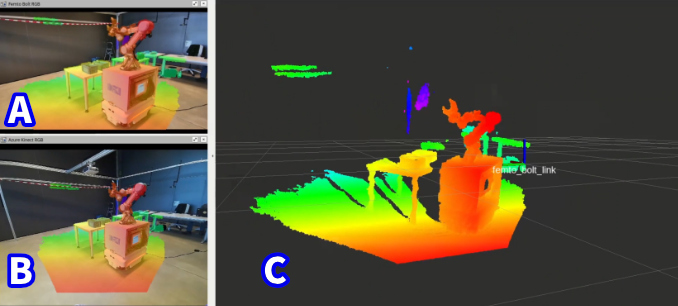
キャリブレ―ションについて (動画のImage Quality: 2:11)
Femto Boltには非常に優れた工場出荷時キャリブレーションが施されており、ROSドライバを通して確認できます。このため、RGB深度データのアライメント精度は、Azure Kinect DKよりも明らかに優れています。
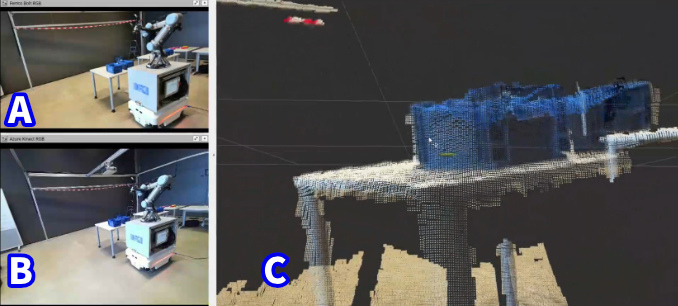
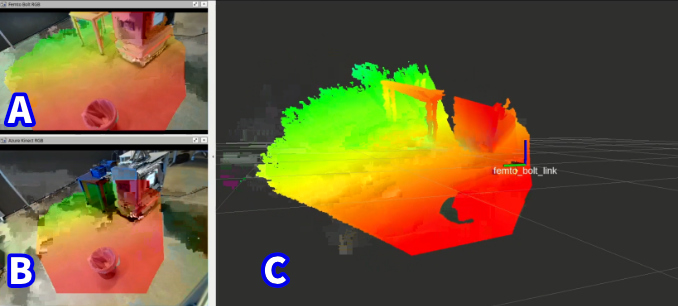
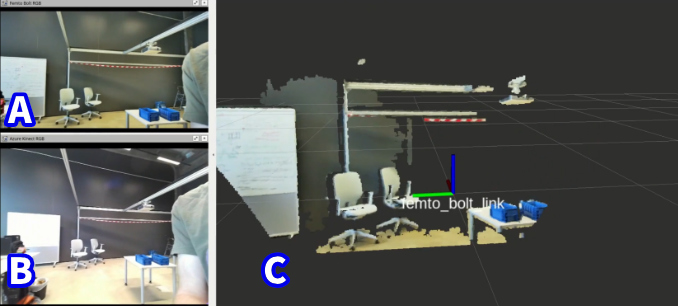
ポイントクラウドの比較について (動画のPoint Cloud comparison: 3:35)
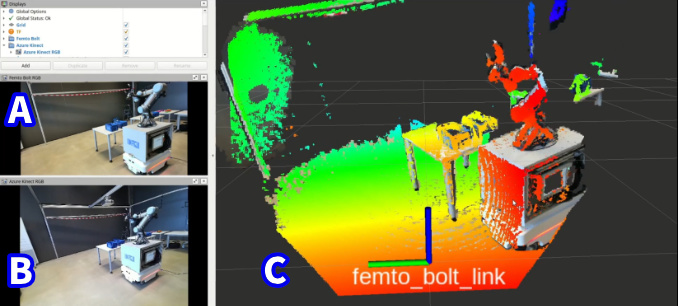
ここでは、2つのカメラのポイントクラウドを比較しています。 2つのポイントクラウドを区別できるよう、着色を変更しています。
- Femto Bolt: RGBカメラの色で着色
- Azure Kinect DK: 虹色で表示
両方のカメラが同じ1メガピクセルのToF深度カメラを使用しており、2つのカメラのポイントクラウドはほぼ同一です。結果が同じであることで、その証明にもなっています。
RGBカメラ徹底比較
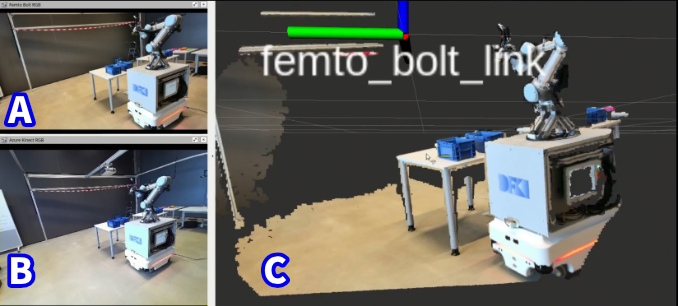
視野の比較 (動画のRGB comparison: 5:22)
Femto Bolt と Azure Kinect DK は 同じToF深度カメラを搭載していますが、RGBカメラについては異なるものを搭載しています。
Femto Bolt のRGBカメラは、Azure Kinect DKと同じ解像度 (3840 x 2160@30fps)ですが、視野角はわずかに小さくなります。ただし、Femto Bolt のRGBカメラはHDRをサポートし、高ダイナミックレンジで、より高品質のRGB画像とビデオを取得できます。
| 主な特徴 |
Femto Bolt |
Azure Kinect DK |
|---|---|---|
| RGB FOV | H80° V51° | H90° V59° |
| RGB HDR support | supported | Not supported |
| RGB dynamic range | Improved to 81.1DB | 45.6DB |

- Femto BoltのポイントクラウドをFemto BoltのRGB画像の上に重ねて表示
- Azure Kinect DKのポイントクラウドをAzure Kinect DKの画像の上に重ねて表示
Femto Bolt のRGBのほうが視野が狭いため、ポイントクラウドの上部と下部が切り取られています。 Azure Kinect DKは、RGBカメラで全体をカバーできます。
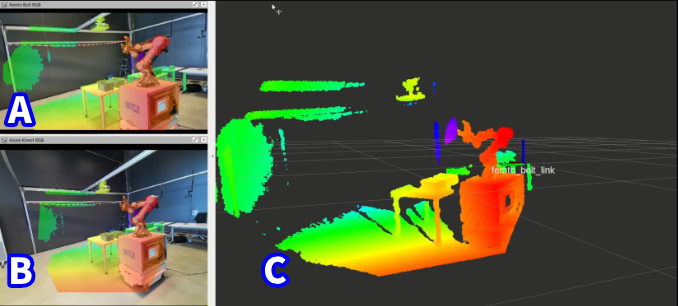
カメラの解像度は800万画素と非常に高いので、視野を狭めたい場合は画像をトリミングして拡大できますが、視野が狭すぎる場合は拡大できません。ほとんどのアプリケーションでは大きな問題とはなりませんが、用途によっては視野角の違いに留意が必要です。
ホワイトバランスの比較 (動画のRGB comparison: 5:23)
通常の照明条件下では、画像品質はほぼ同等です。 もし何か違いがあるとすれば、Femto Boltの方が、わずかに優れたホワイトバランスと、より自然な色彩を持っている印象です。

HDR機能の比較 (動画のRGB comparison: 5:52)
ただし、逆光がある場合は状況が異なります。Femto BoltのHDR機能により、シーン内の明るさの違いを均等に調整可能できます。Azure Kinect DKでは、同じ条件下で 明るい所 (窓の外など)は露出過度になり、暗い所 (室内にある物体など)は露出不足になります。
まとめ
Femto Boltは、優れたキャリブレーションと高いパフォーマンスにより、Azure Kinect DKの代替として最適です。Azure Kinect DKの代わりとして、ぜひご検討ください。詳細なご質問や購入に関しては、お気軽にお問い合わせください。
よろしければ、リリース当時の比較記事もご参照ください。

|
■Orbbec Femto Bolt の詳細、お問い合わせはこちら Orbbec Femto シリーズ | 6軸IMU搭載 複数台同期可能 ToF方式デプスカメラ メーカー (Orbbec 3D Tech. Intl. Inc) WEBサイト
|
この他の Orbbec社 3Dカメラ 事例紹介記事もぜひご参照ください




