|
2019年4月19日追記 : 本記事に追記をし、改めて記事を公開しました |
人気の3Dカメラ Intel RealSense Dシリーズには D415 と D435 の2種類がラインアップされています。今回はこの D415 と D435 の違いについてご紹介をしたいと思います。どちらの機種を選ぶべきか迷った際のご参考になれば幸いです。
※本記事は以下のWEBページを参照しています
Choosing an Intel RealSense Depth Camera
D415とD435 のスペック上の主な違いについては以下のようなことが挙げられます。
その1 : 視野角度 (FoV)
D415 : およそ 70°
D435 : およそ 90°
その2 : シャッタータイプ
D415 : ローリングシャッター
D435 : グローバルシャッター
より広い視野角と、動きのある対象物の撮影の場合に歪みの生じにくいグローバルシャッターの採用により、D435の方が上位機種だと捉えることができますが、実はD415に関してもD435と比較し優れている、以下のような違いがあります。
その3: モジュールに関する違い
D415 : Intel RealSense D415 module を使用
D435 : Intel RealSense D430 module を使用
D415については、Imagers, Emitters, RGBカメラ が一つのコンピュータボードもしくはstiffener (補強板)上にあるため、キャリブレーションの実施がはるかに容易だという特長があります。
一方 D435においては、RGBカメラはモジュール上にはありません(RGBカメラはモジュールに別途接続されている状態)。デプスアルゴリズムはセンサの正確な配置に基づいているため、同じstiffener (補強板)に固定をしないと、深度とRGB間のキャリブレーションが困難になる可能性があります。しかし、「RGBカメラを選択できる」という柔軟性も以前からユーザーに求められていた機能であるということもあり、ユーザーの利用方法によってはこれはメリットとなる部分でもあります。
その4 : Imager の違い
D415 : 2メガピクセルのImager を使用
D435 : 1メガピクセルのImager を使用
カメラ性能の観点からみると、D435は視野角度が広いため、画像の特定部分を見た場合に粒度の値が小さい(つまり解像度が低い)といえます。ステレオカメラは2つのセンサにより、わずかに異なる視点からの2つの画像を取得し、それらを比較し深度を特定しています。
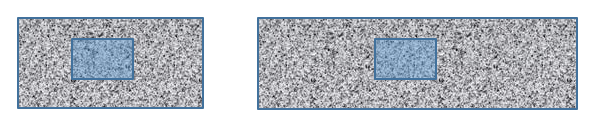
障害物回避や人検知のような用途の場合には大きな差はありませんが、3Dスキャンなど精度が最優先の用途の場合には、D415の方がより優れた正確なスキャンが可能だと言えます
(いうなれば、D415のほうがD435に比べて2倍以上正確)。
その5 : 最小Zの違い
カメラとキャプチャ対象との距離(最小Z)について、D435はD415と比べて任意の範囲でより多くの深度ノイズ (>2倍) があり、同じ解像度での最小操作距離が小さくなる(約0.5倍)ため、カメラにより近づことができます。たとえば、848×480の解像度において、D415の最小Zはおよそ29cm、一方D435の最小Zはおよそ17cmとなります。
■ まとめ
D415 と D435にはそれぞれに特徴があり、ユーザーさまの用途により使い分けていただくのがベストな選択方法だと言えます(なお価格はD415のほうがお求めやすくなっています)。
それぞれこのような用途におすすめです
D435 :
視野角が広いことにより、ロボットやドローン等のナビゲートやトラッキング用途 に適している。またグローバルシャッターは高速で動く対象を撮影する際に優れたパフォーマンスを発揮する。
D415:
取得する画像データに正確さが求められる3Dスキャンなどの用途 に適している。
テガラの研究開発者向け海外製品調達サービス「ユニポス」でも、RealSense D シリーズをお買い求めいただます。
| ■ 商品の詳細、お問い合わせはこちら Intel RealSense Depth Camera (D415/D435) |