

近年、ロボット研究の分野で遠隔操作アプリケーションが注目されています。海外製品調達・コンサルテーションサービス「ユニポス」(テガラ株式会社 運営)の取り扱い製品のなかでも、複雑な作業を両手で遠隔操作できるロボット「ALOHA」が人気を集めています。
ALOHAはオープンソースのため、ユーザーのニーズに合わせて柔軟に変更や拡張ができます。しかし、その分ハードウェアやソフトウェアの設定手順が多くなります。そのため、購入後すぐに使いたい方にとっては、セットアップが面倒に感じられるかもしれません。
そこで今回は、これまで輸入だけでなく設置・セットアップの実績も豊富なALOHAについて、導入を検討されている方への参考情報として、大まかな事前準備の流れや注意点をご紹介します。
本記事は、ALOHA の以下の情報を参考にしています
Tony Z. Zhao氏 ALOHA公式 GitHub
https://github.com/tonyzhaozh/aloha
The ALOHA tutorial (for Stationary version 1) ALOHA公式マニュアル
https://docs.google.com/document/d/1sgRZmpS7HMcZTPfGy3kAxDrqFMtNNzmK-yVtX5cKYME/edit
目次
ALOHAとは
専用デスク上で操作する据え置き型の Aloha Stationary (旧名称:ALOHA Bimanual Teleoperation Kit)は、 「A Low-cost Open-source Hardware System for Bimanual Teleoperation」の略で、両手遠隔操作のための低価格オープンソースハードウェアシステムです。
ALOHAのコンセプト、ならびに前モデル情報は以下の記事をご参照ください。

ALOHA Arm の組み立て
– Master Arm の組み立て
– グリッパーへのテープ巻き付けと、Slave Arm へのグリッパー取り付け
Tips1. 3Dプリンター部品の穴あけ加工
Tips1-1.ねじ穴のサイズ確認と必要工具
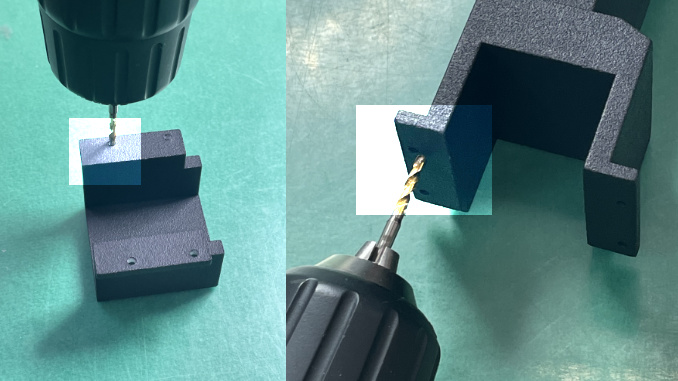
3Dプリンター部品の中には、ねじ穴の加工が必要な場合があります。電動ドリルで穴あけを行う際は、ドリルビットがずれないよう注意が必要です。使用するねじのサイズと同じか、やや大きめのドリルビットを選ぶことをおすすめします。ドリルの回転数は部品の破損を防ぐためにも、低速に設定することを推奨します。
Tips1-2.ねじ穴の下穴あけ
付属のオリジナルボルトは タッピンねじではありません。そのため、下穴をあけた後、タッピングビットでねじ山を切っておくと確実に固定できます。下穴がない状態でねじ込むと、穴が大きくなり過ぎてねじが固定できなくなる恐れがあります。
Tips1-3.推奨ドリルビットサイズ

弊社の3Dプリンター部品の組立事例では、以下のドリルビットサイズを使用しています。
| ドリルビットサイズ | 加工部品 |
| Φ2.0mm | ローター(カウンターボア)、カムマウント |
| Φ2.5mm | ハンドル下部、ハンドル上部、スライダー(貫通穴)、ローター(エンドホール) |
| Φ3.0mm | フィンガー1、フィンガー2 |
| M3タップ | スライダー(Φ2.5mm下穴)、ローター(Φ2.5mm下穴) |
Tips1-4.スライダーのねじ穴加工
スライダーの場合は、レールガイド面までΦ2.5mmの貫通穴をあけておくと、きれいなねじ山を切ることができます。
Tips2.バックドライブユニットの組み立て

バックドライブユニットの組み立ての際は、ねじロック剤 (ロックタイト) を使用して、すべてのねじを固定してください。
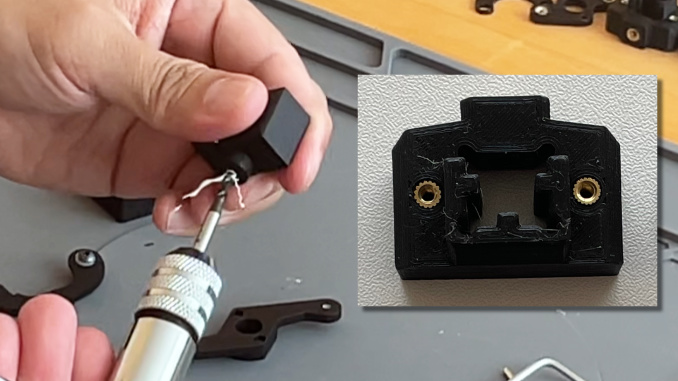
Tips3.エンドエフェクターサーボNo.9のねじ交換
エンドエフェクターサーボNo.9への部品の組み付けは本来M2×10のねじを使用しますが、3Dプリントした「ローター(部品)」にはザグリ穴があり、ねじ全体を加締めると、サーボの軸が固定されて回転しなくなる可能性があります。
対処法として、M2×8のねじに交換するか、元のねじの長さを9~8mmにカットするとよいでしょう。
Tips4.フィンガー1、フィンガー2へのグリップテープ貼り付け
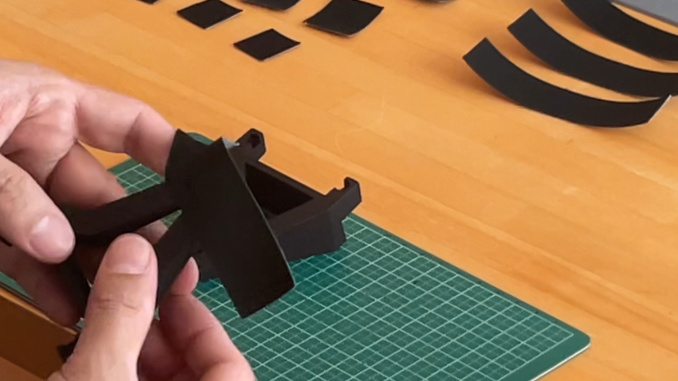
フィンガー1とフィンガー2にグリップテープを貼り付ける場合は、部品をアームに取り付ける前に、グリップテープを貼ると作業がスムーズです。
ALOHAのテーブルとフレームの組み立て
– テーブルの組み立て
– フレームの組み立て
– テーブルへのフレームの取り付け
Tips5.組み立て順序

フレームの組み立ては、アルミフレーム全体を組み立ててからテーブルに乗せると作業が楽です。
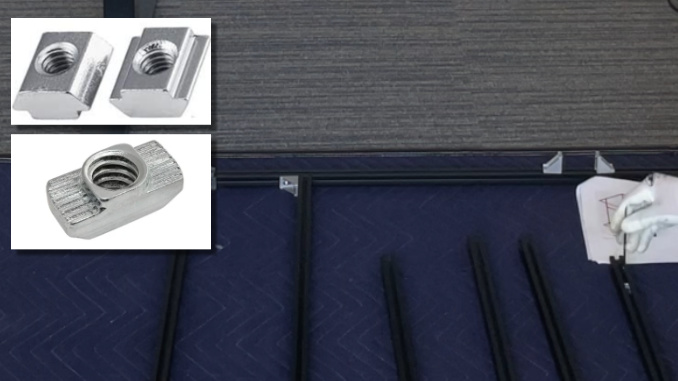
組み立て時は、必要な数のTナットをあらかじめフレーム (支柱や枠) に入れておく必要があります。後からTナットを追加するには分解が必要です。
Tips6.フレームの補強
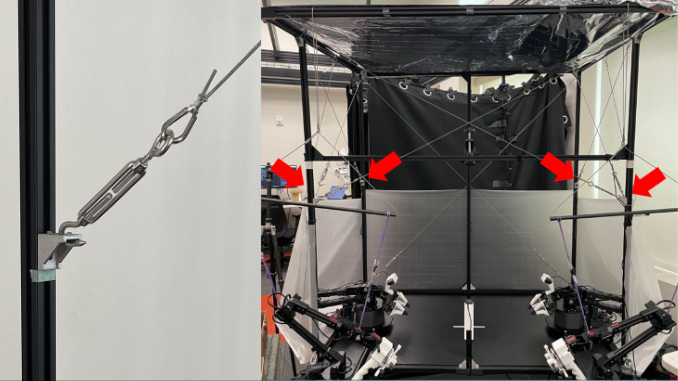
アーム操作に必要なワイヤーを、可動範囲の確保と張力に注意しながらフレームを補強します。
ワイヤーを強く張り過ぎると、アルミフレームの前面や側面の中央部分がたわむ可能性があります。フレームが過剰な力を受けないよう、適切な張力管理が重要です。
Tips7.アーム動作時の安全対策
アーム操作時の安全確保には十分に注意してください。
動作のリセットや停止時にアームが急に落下する可能性があるため、支えるか緩衝材を敷いておくことをおすすめします。テストの際は、ゆっくりとした動作から始めましょう。
まとめ
Trossen Robotics社は ALOHA Stationary の新バージョンをリリースし、よりシンプルなフレーム構造、新しい部品や機能のアップデートがされております (2024年4月時点)。
当該記事の情報は、それ以前のバージョンのものではありますが、基本的な原理や内容はほぼ同じです。ご参考になりますと幸いです。
また、ご自身の用途に適したハードウェア構造やカスタマイズの希望がございましたらご相談ください。
ご希望の構成の設計・製作をお手伝いいたします。
以下の記事にて、ALOHAのソフトウェアインストールについての参考情報を公開しております。よろしければ、ご参照ください。

サポートプランのご案内
なおこれらのセットアップを弊社にて実施し、「すぐに使える」状態でお客様にお届けするサポートプランもございます。
ALOHA は各種フレームやロボットアームがバラバラの状態でメーカーより納品されます。これらのハードウェアをお客様の利用環境 (研究室等) で組み立て、セットアップをし、動作検証をした上で納品いたします (海外メーカーからの手配も弊社にて承ります)。
また ALOHAの動作には、機械学習に適したハイスペックなコンピュータの使用が推奨されています。このALOHA の動作に最適なコンピュータのご用意も弊社にお任せください。お客様のご利用用途に合わせて構成を検討したマシンをご提案します。
![]()
![]()
テガラ株式会社 TKS 事業部では、このように研究開発・実験に必要な機材を一式まとめてご提供するサービス をご提供しています (TKS = TurnKey System)。ぜひお気軽にお問い合わせください。
参考 : ロボットシステムの組み立て・現地設置 (ALOHA)

|
ALOHA Kit の設置・設定もお気軽にご相談ください
|



